Kartierung von Katastrophen und Risikogebieten
Detektion von radioaktiven Altlagerstätten in der Sperrzone von Tschernobyl mittels drohnenbasiertem Laserscanning
Hintergrund
Am 26. April 1986 ereignete sich der bislang schwerste Atomunfall im Kernkraftwerk Tschernobyl. Die starke Kontamination führte zur kompletten Evakuierung in einem Gebiet mit einem Radius von circa 30 Kilometern. Traurige Berühmtheit erlangte der Pinienwald um das Kraftwerk, der sich aufgrund der starken radioaktiven Strahlung rötlich färbte und daher als „Roter Wald“ in die Geschichte einging.
In besonders stark verseuchten Gebieten wurden die kontaminierte Biomasse und der kontaminierte Oberboden vergraben, um die radioaktive Strahlungsbelastung um Größenordnungen zu reduzieren. Da die zuständigen Behörden in der damaligen Sowjetunion die Lagerstätten nur sehr oberflächlich dokumentierten, gab es bis dato keine verlässlichen Karten für eine gezielte Entsorgung
Ziele
Derzeit wird das vergrabene Inventar durch die staatlichen Unternehmen für radioaktives Abfallmanagement systematisch untersucht. Hierbei sollen nicht nur die vermuteten bzw. unbekannten Altablagerungen aufgefunden werden, sondern die nachgewachsene Biomasse kartiert werden.
Dr. Norbert Molitor (Plejades – Independet Experts), der seit 20 Jahren als Experte in der Sperrzone arbeitet, schätzt, dass es noch 300 Jahre dauern wird, bis die derzeit dominierenden kurzlebigen Radioiso?tope Cs-137 und Sr-90 weitgehend zerfallen sind.
Bisherige Ergebnisse
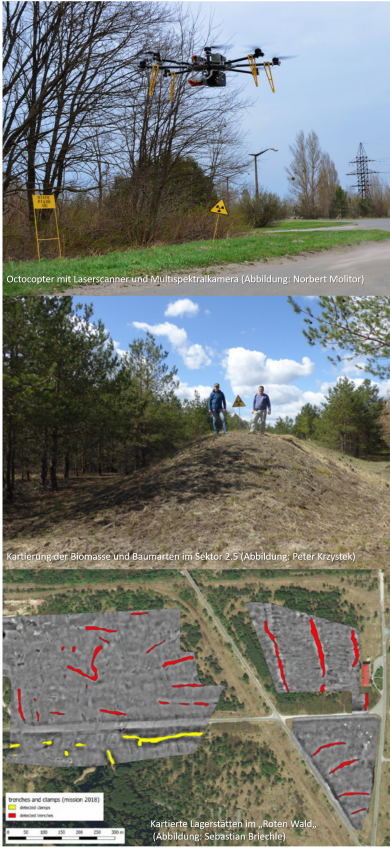
Die Altlagerstätten (Gräber und Halden) sind teilweise deutlich sichtbar, manche befinden sich aber mittlerweile unter nachgewachsenen Bäumen und haben sich nach mehr als 30 Jahren im Zentimeter- und Dezimeterbereich leicht gesenkt. Für eine kontaktlose Kartierung eignet sich das drohnenbasierte Laserscanning, das die Vegetation teilweise durchdringt und die Vergrabungsstätten „sieht“. Wenn man die Reflexionen registriert und in Koordinaten umrechnet, erhält man eine sehr dichte dreidimensionale Punktwolke, welche die gesamte Information enthält, die für die Kartierung der Baumlandschaft und der Gräber notwendig ist. Prof. Krzystek merkt an: „Mit modernen Methoden des maschinellen Lernens und des Com?puter Vision können wir die einzelnen Waldobjekte erkennen und klassifizieren. Wir erzeugen eine virtuelle Baumlandschaft, in der die Baumarten und das Baumvolumen bekannt sind. Uns gelingt sogar die Detektion von stehenden und liegenden abgestorbenen Bäumen.“ Die Software Treefinder [1] kann eine beliebig große Fläche voll-automatisch berechnen. Die Daten können für spätere Simulation von Flächenbränden verwendet werden.
Der Doktorand Sebastian Briechle konnte im Rahmen seiner Dissertation die Lagestätten mit hoher Genauigkeit nachweisen. Es gelang sogar, die Lage der detektierten Bereiche mit In-situ-Bohrungen vor Ort im „Roten Wald“ mithilfe eines speziellen Suchdosi?meters und -radiometers zu bestätigen [2].
Ausblick
Es bestehen bereits weitere Planungen, die gesamte Sperrzone zu kartieren. Es wird noch Jahrhunderte dauern, das radioaktive kontaminierte Gebiet und das Inventar der gesamten Kernkraftanlage zu entsorgen. Die wissenschaftlichen Untersuchungen werden im Rahmen des vom Bundesministerium für Bildung und Forschung (BMBF) gefördertem interdisziplinären Forschungsprojekt GeoFlyer „Optimierung der Flug?ökonomie eines Remotely Piloted Aircraft Systems (RPAS) zur Kartierung von entfernten Katastrophen und Risikogebieten geführt.
Publikationen
[1] PRIMAVISION Technologies GbR (2017). 3D tree seg?mentation from point clouds (lidar, DSM) for forest inventory. http://primavision-tec.de/products/prod_tree-finder. Accessed 2020-05-01.
[2] Briechle, S., Molitor, N., Krzystek, P., and Vosselmann, G., Detection of radioactive waste sites in the Chernobyl exclusion zone using UAV-based lidar data and multispectral imagery. ISPRS Journal of Photogrammetry and Remote Sensing. DOI:10.5194/isprs-annalsV-2-2020-203-2020.